
last edited: 2026-03-25 02:32:14 +0000
Creating SimObjects in the memory system
In this chapter, we will create a simple memory object that sits between the CPU and the memory bus. In the next chapter we will take this simple memory object and add some logic to it to make it a very simple blocking uniprocessor cache.
gem5 request and response ports
Before diving into the implementation of a memory object, we should first understand gem5’s request and response port interface. As previously discussed in simple-config-chapter, all memory objects are connected together via ports. These ports provide a rigid interface between these memory objects.
These ports implement three different memory system modes: timing, atomic, and functional. The most important mode is timing mode. Timing mode is the only mode that produces correct simulation results. The other modes are only used in special circumstances.
Atomic mode is useful for fastforwarding simulation to a region of interest and warming up the simulator. This mode assumes that no events will be generated in the memory system. Instead, all of the memory requests execute through a single long callchain. It is not required to implement atomic accesses for a memory object unless it will be used during fastforward or during simulator warmup.
Functional mode is better described as debugging mode. Functional
mode is used for things like reading data from the host into the
simulator memory. It is used heavily in syscall emulation mode. For
instance, functional mode is used to load the binary in the
process.cmd from the host into the simulated system’s memory so the
simulated system can access it. Functional accesses should return the
most up-to-date data on a read, no matter where the data is, and should
update all possible valid data on a write (e.g., in a system with caches
there may be multiple valid cache blocks with the same address).
Packets
In gem5, Packets are sent across ports. A Packet is made up of a
MemReq which is the memory request object. The MemReq holds
information about the original request that initiated the packet such as
the requestor, the address, and the type of request (read, write, etc.).
Packets also have a MemCmd, which is the current command of the
packet. This command can change throughout the life of the packet (e.g.,
requests turn into responses once the memory command is satisfied). The
most common MemCmd are ReadReq (read request), ReadResp (read
response), WriteReq (write request), WriteResp (write response).
There are also writeback requests (WritebackDirty, WritebackClean)
for caches and many other command types.
Packets also either keep the data for the request, or a pointer to the data. There are options when creating the packet whether the data is dynamic (explicitly allocated and deallocated), or static (allocated and deallocated by the packet object).
Finally, packets are used in the classic caches as the unit to track coherency. Therefore, much of the packet code is specific to the classic cache coherence protocol. However, packets are used for all communication between memory objects in gem5, even if they are not directly involved in coherence (e.g., DRAM controllers and the CPU models).
All of the port interface functions accept a Packet pointer as a
parameter. Since this pointer is so common, gem5 includes a typedef for
it: PacketPtr.
Port interface
There are two types of ports in gem5: request ports and response ports.
Whenever you implement a memory object, you will implement at least one
of these types of ports. To do this, you create a new class that
inherits from either RequestPort or ResponsePort for request and response
ports, respectively. Request ports send requests (and receive response),
and response ports receive requests (and send responses).
The figure below outlines the simplest interaction between a request and response port. This figure shows the interaction in timing mode. The other modes are much simpler and use a simple callchain between the requestor and the responder.
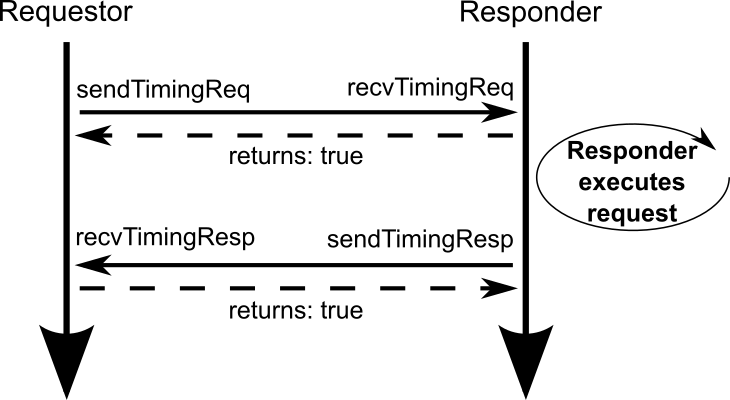
As mentioned above, all of the port interfaces require a PacketPtr as
a parameter. Each of these functions (sendTimingReq, recvTimingReq,
etc.), accepts a single parameter, a PacketPtr. This packet is the
request or response to send or receive.
To send a request packet, the requestor calls sendTimingReq. In turn,
(and in the same callchain), the function recvTimingReq is called on
the responder with the same PacketPtr as its sole parameter.
The recvTimingReq has a return type of bool. This boolean return
value is directly returned to the calling requestor. A return value of
true signifies that the packet was accepted by the responder. A return
value of false, on the other hand, means that the responder was unable to
accept and the request must be retried sometime in the future.
In the figure above, first, the requestor sends a timing request by
calling sendTimingReq, which in turn calls recvTimingResp. The
responder, returns true from recvTimingReq, which is returned from the
call to sendTimingReq. The requestor continue executing, and the responder
does whatever is necessary to complete the request (e.g., if it is a
cache, it looks up the tags to see if there is a match to the address in
the request).
Once the responder completes the request, it can send a response to the
requestor. The responder calls sendTimingResp with the response packet (this
should be the same PacketPtr as the request, but it should now be a
response packet). In turn, the request function recvTimingResp is
called. The requestor’s recvTimingResp function returns true, which is
the return value of sendTimingResp in the responder. Thus, the interaction
for that request is complete.
Later, in the example section we will show the example code for these functions.
It is possible that the requestor or responder is busy when they receive a request or a response. The figure below shows the case where the responder is busy when the original request was sent.
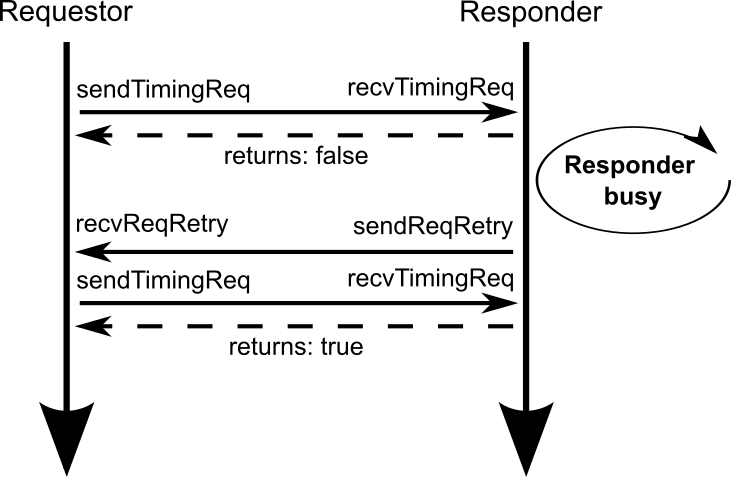
In this case, the responder returns false from the recvTimingReq
function. When a requestor receives false after calling sendTimingReq, it
must wait until the its function recvReqRetry is executed. Only when
this function is called is the requestor allowed to retry calling
sendTimingRequest. The above figure shows the timing request failing
once, but it could fail any number of times. Note: it is up to the
requestor to track the packet that fails, not the responder. The responder does
not keep the pointer to the packet that fails.
Similarly, this figure shows the case when the requestor is busy at
the time the responder tries to send a response. In this case, the responder
cannot call sendTimingResp until it receives a recvRespRetry.
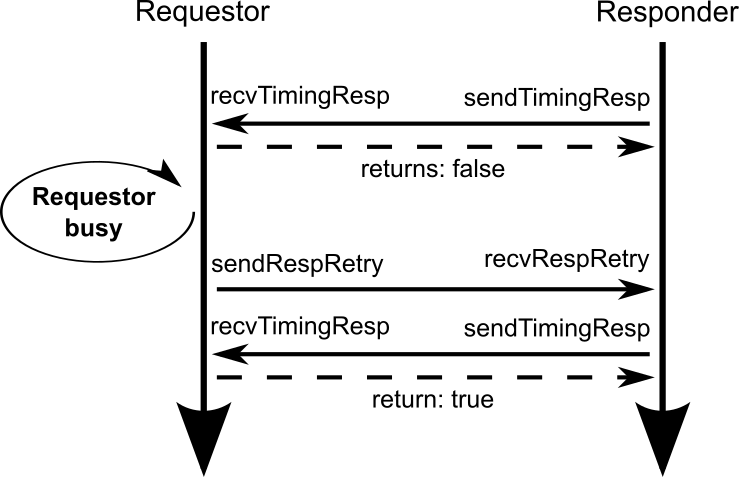
Importantly, in both of these cases, the retry codepath can be a single
call stack. For instance, when the requestor calls sendRespRetry,
recvTimingReq can also be called in the same call stack. Therefore, it
is easy to incorrectly create an infinite recursion bug, or other bugs.
It is important that before a memory object sends a retry, that it is
ready at that instant to accept another packet.
Simple memory object example
In this section, we will build a simple memory object. Initially, it will simply pass requests through from the CPU-side (a simple CPU) to the memory-side (a simple memory bus). See the figure below. It will have a single memory-side requestor port, to send requests to the memory bus, and two cpu-side ports for the instruction and data cache ports of the CPU. In the next chapter simplecache-chapter, we will add the logic to make this object a cache.

Declare the SimObject
Just like when we were creating the simple SimObject in
hello-simobject-chapter, the first step is to create a SimObject Python
file. We will call this simple memory object SimpleMemobj and create
the SimObject Python file in src/learning_gem5/simple_memobj.
from m5.params import *
from m5.proxy import *
from m5.SimObject import SimObject
class SimpleMemobj(SimObject):
type = 'SimpleMemobj'
cxx_header = "learning_gem5/part2/simple_memobj.hh"
inst_port = ResponsePort("CPU side port, receives requests")
data_port = ResponsePort("CPU side port, receives requests")
mem_side = RequestPort("Memory side port, sends requests")
For this object, we inherit from SimObject. The
SimObject class has a pure virtual functions that we will have to
define in our C++ implementation, getPort.
This object’s parameters are three ports. Two ports for the CPU to connect the instruction and data ports and a port to connect to the memory bus. These ports do not have a default value, and they have a simple description.
It is important to remember the names of these ports. We will explicitly
use these names when implementing SimpleMemobj and defining the
getPort function.
You can download the SimObject file here.
Of course, you also need to create a SConscript file in the new directory as well that declares the SimObject Python file. You can download the SConscript file here.
Define the SimpleMemobj class
Now, we create a header file for SimpleMemobj.
#include "mem/port.hh"
#include "params/SimpleMemobj.hh"
#include "sim/sim_object.hh"
class SimpleMemobj : public SimObject
{
private:
public:
/** constructor
*/
SimpleMemobj(SimpleMemobjParams *params);
};
Define a response port type
Now, we need to define classes for our two kinds of ports: the CPU-side
and the memory-side ports. For this, we will declare these classes
inside the SimpleMemobj class since no other object will ever use
these classes.
Let’s start with the response port, or the CPU-side port. We are going to
inherit from the ResponsePort class. The following is the required code
to override all of the pure virtual functions in the ResponsePort class.
class CPUSidePort : public ResponsePort
{
private:
SimpleMemobj *owner;
public:
CPUSidePort(const std::string& name, SimpleMemobj *owner) :
ResponsePort(name, owner), owner(owner)
{ }
AddrRangeList getAddrRanges() const override;
protected:
Tick recvAtomic(PacketPtr pkt) override { panic("recvAtomic unimpl."); }
void recvFunctional(PacketPtr pkt) override;
bool recvTimingReq(PacketPtr pkt) override;
void recvRespRetry() override;
};
This object requires five functions to be defined.
This object also has a single member variable, its owner, so it can call functions on that object.
Define a request port type
Next, we need to define a request port type. This will be the memory-side port which will forward request from the CPU-side to the rest of the memory system.
class MemSidePort : public RequestPort
{
private:
SimpleMemobj *owner;
public:
MemSidePort(const std::string& name, SimpleMemobj *owner) :
RequestPort(name, owner), owner(owner)
{ }
protected:
bool recvTimingResp(PacketPtr pkt) override;
void recvReqRetry() override;
void recvRangeChange() override;
};
This class only has three pure virtual functions that we must override.
Defining the SimObject interface
Now that we have defined these two new types CPUSidePort and
MemSidePort, we can declare our three ports as part of SimpleMemobj.
We also need to declare the pure virtual function in the
SimObject class, getPort. The
function is used by gem5 during the initialization phase to connect
memory objects together via ports.
class SimpleMemobj : public SimObject
{
private:
<CPUSidePort declaration>
<MemSidePort declaration>
CPUSidePort instPort;
CPUSidePort dataPort;
MemSidePort memPort;
public:
SimpleMemobj(SimpleMemobjParams *params);
Port &getPort(const std::string &if_name,
PortID idx=InvalidPortID) override;
};
You can download the header file for the SimpleMemobj
here.
Implementing basic SimObject functions
For the constructor of SimpleMemobj, we will simply call the
SimObject constructor. We also need to initialize all of the ports.
Each port’s constructor takes two parameters: the name and a pointer to
its owner, as we defined in the header file. The name can be any string,
but by convention, it is the same name as in the Python SimObject file. We also initialize blocked to be false.
#include "learning_gem5/part2/simple_memobj.hh"
#include "debug/SimpleMemobj.hh"
SimpleMemobj::SimpleMemobj(SimpleMemobjParams *params) :
SimObject(params),
instPort(params->name + ".inst_port", this),
dataPort(params->name + ".data_port", this),
memPort(params->name + ".mem_side", this), blocked(false)
{
}
Next, we need to implement the interfaces to get the ports. This
interface is made of the function getPort.
The function takes two parameters. The if_name is the Python
variable name of the interface for this object.
To implement getPort, we compare the if_name and check to see
if it is mem_side as specified in our Python SimObject file. If it is,
then we return the memPort object. If the name is "inst_port", then we return the
instPort, and if the name is data_port we return the data port. If not, then we pass the request name to our parent.
Port &
SimpleMemobj::getPort(const std::string &if_name, PortID idx)
{
panic_if(idx != InvalidPortID, "This object doesn't support vector ports");
// This is the name from the Python SimObject declaration (SimpleMemobj.py)
if (if_name == "mem_side") {
return memPort;
} else if (if_name == "inst_port") {
return instPort;
} else if (if_name == "data_port") {
return dataPort;
} else {
// pass it along to our super class
return SimObject::getPort(if_name, idx);
}
}
Implementing request and response port functions
The implementation of both the request and response port is relatively
simple. For the most part, each of the port functions just forwards the
information to the main memory object (SimpleMemobj).
Starting with two simple functions, getAddrRanges and recvFunctional
simply call into the SimpleMemobj.
AddrRangeList
SimpleMemobj::CPUSidePort::getAddrRanges() const
{
return owner->getAddrRanges();
}
void
SimpleMemobj::CPUSidePort::recvFunctional(PacketPtr pkt)
{
return owner->handleFunctional(pkt);
}
The implementation of these functions in the SimpleMemobj are equally
simple. These implementations just pass through the request to the
memory side. We can use DPRINTF calls here to track what is happening
for debug purposes as well.
void
SimpleMemobj::handleFunctional(PacketPtr pkt)
{
memPort.sendFunctional(pkt);
}
AddrRangeList
SimpleMemobj::getAddrRanges() const
{
DPRINTF(SimpleMemobj, "Sending new ranges\n");
return memPort.getAddrRanges();
}
Similarly for the MemSidePort, we need to implement recvRangeChange
and forward the request through the SimpleMemobj to the response port.
void
SimpleMemobj::MemSidePort::recvRangeChange()
{
owner->sendRangeChange();
}
void
SimpleMemobj::sendRangeChange()
{
instPort.sendRangeChange();
dataPort.sendRangeChange();
}
Implementing receiving requests
The implementation of recvTimingReq is slightly more complicated. We
need to check to see if the SimpleMemobj can accept the request. The
SimpleMemobj is a very simple blocking structure; we only allow a
single request outstanding at a time. Therefore, if we get a request
while another request is outstanding, the SimpleMemobj will block the
second request.
To simplify the implementation, the CPUSidePort stores all of the
flow-control information for the port interface. Thus, we need to add an
extra member variable, needRetry, to the CPUSidePort, a boolean that
stores whether we need to send a retry whenever the SimpleMemobj
becomes free. Then, if the SimpleMemobj is blocked on a request, we
set that we need to send a retry sometime in the future.
bool
SimpleMemobj::CPUSidePort::recvTimingReq(PacketPtr pkt)
{
if (!owner->handleRequest(pkt)) {
needRetry = true;
return false;
} else {
return true;
}
}
To handle the request for the SimpleMemobj, we first check if the
SimpleMemobj is already blocked waiting for a response to another
request. If it is blocked, then we return false to signal the calling
request port that we cannot accept the request right now. Otherwise, we
mark the port as blocked and send the packet out of the memory port. For
this, we can define a helper function in the MemSidePort object to
hide the flow control from the SimpleMemobj implementation. We will
assume the memPort handles all of the flow control and always return
true from handleRequest since we were successful in consuming the
request.
bool
SimpleMemobj::handleRequest(PacketPtr pkt)
{
if (blocked) {
return false;
}
DPRINTF(SimpleMemobj, "Got request for addr %#x\n", pkt->getAddr());
blocked = true;
memPort.sendPacket(pkt);
return true;
}
Next, we need to implement the sendPacket function in the
MemSidePort. This function will handle the flow control in case its
peer response port cannot accept the request. For this, we need to add a
member to the MemSidePort to store the packet in case it is blocked.
It is the responsibility of the sender to store the packet if the
receiver cannot receive the request (or response).
This function simply sends the packet by calling the function
sendTimingReq. If the send fails, then this object stores the packet in
the blockedPacket member function so it can send the packet later
(when it receives a recvReqRetry). This function also contains some
defensive code to make sure there is not a bug and we never try to
overwrite the blockedPacket variable incorrectly.
void
SimpleMemobj::MemSidePort::sendPacket(PacketPtr pkt)
{
panic_if(blockedPacket != nullptr, "Should never try to send if blocked!");
if (!sendTimingReq(pkt)) {
blockedPacket = pkt;
}
}
Next, we need to implement the code to resend the packet. In this
function, we try to resend the packet by calling the sendPacket
function we wrote above.
void
SimpleMemobj::MemSidePort::recvReqRetry()
{
assert(blockedPacket != nullptr);
PacketPtr pkt = blockedPacket;
blockedPacket = nullptr;
sendPacket(pkt);
}
Implementing receiving responses
The response codepath is similar to the receiving codepath. When the
MemSidePort gets a response, we forward the response through the
SimpleMemobj to the appropriate CPUSidePort.
bool
SimpleMemobj::MemSidePort::recvTimingResp(PacketPtr pkt)
{
return owner->handleResponse(pkt);
}
In the SimpleMemobj, first, it should always be blocked when we
receive a response since the object should be waiting for the response.
Before sending the packet back to the CPU side, we need to mark that the
object is no longer blocked. This must be done before calling
sendTimingResp. Otherwise, it is possible to get stuck in an infinite
loop as it is possible that the request port has a single callchain between
receiving a response and sending another request.
After unblocking the SimpleMemobj, we check to see if the packet is an
instruction or data packet and send it back across the appropriate port.
Finally, since the object is now unblocked, we may need to notify the
CPU side ports that they can now retry their requests that failed.
bool
SimpleMemobj::handleResponse(PacketPtr pkt)
{
assert(blocked);
DPRINTF(SimpleMemobj, "Got response for addr %#x\n", pkt->getAddr());
blocked = false;
// Simply forward to the memory port
if (pkt->req->isInstFetch()) {
instPort.sendPacket(pkt);
} else {
dataPort.sendPacket(pkt);
}
instPort.trySendRetry();
dataPort.trySendRetry();
return true;
}
Similar to how we implemented a convenience function for sending packets
in the MemSidePort, we can implement a sendPacket function in the
CPUSidePort to send the responses to the CPU side. This function calls
sendTimingResp which will in turn call recvTimingResp on the peer
request port. If this call fails and the peer port is currently blocked,
then we store the packet to be sent later.
void
SimpleMemobj::CPUSidePort::sendPacket(PacketPtr pkt)
{
panic_if(blockedPacket != nullptr, "Should never try to send if blocked!");
if (!sendTimingResp(pkt)) {
blockedPacket = pkt;
}
}
We will send this blocked packet later when we receive a
recvRespRetry. This function is exactly the same as the recvReqRetry
above and simply tries to resend the packet, which may be blocked again.
void
SimpleMemobj::CPUSidePort::recvRespRetry()
{
assert(blockedPacket != nullptr);
PacketPtr pkt = blockedPacket;
blockedPacket = nullptr;
sendPacket(pkt);
}
Finally, we need to implement the extra function trySendRetry for the
CPUSidePort. This function is called by the SimpleMemobj whenever
the SimpleMemobj may be unblocked. trySendRetry checks to see if a
retry is needed which we marked in recvTimingReq whenever the
SimpleMemobj was blocked on a new request. Then, if the retry is
needed, this function calls sendRetryReq, which in turn calls
recvReqRetry on the peer request port (the CPU in this case).
void
SimpleMemobj::CPUSidePort::trySendRetry()
{
if (needRetry && blockedPacket == nullptr) {
needRetry = false;
DPRINTF(SimpleMemobj, "Sending retry req for %d\n", id);
sendRetryReq();
}
}
In addition to this function, to finish the file add the create function for SimpleMemobj.
SimpleMemobj*
SimpleMemobjParams::create()
{
return new SimpleMemobj(this);
}
You can download the implementation for the SimpleMemobj
here.
The following figure shows the relationships between
the CPUSidePort, MemSidePort, and SimpleMemobj. This figure shows
how the peer ports interact with the implementation of the
SimpleMemobj. Each bold function is one that we had to implement, and
the non-bold functions are the port interfaces to the peer ports. The
colors highlight one API path through the object (e.g., receiving a
request or updating the memory ranges).

For this simple memory object, packets are just forwarded from the
CPU-side to the memory side. However, by modifying handleRequest and
handleResponse, we can create rich featureful objects, like a cache in
the next chapter.
Create a config file
This is all of the code needed to implement a simple memory object! In the next chapter, we will take this framework and add some caching logic to make this memory object into a simple cache. However, before that, let’s look at the config file to add the SimpleMemobj to your system.
This config file builds off of the simple config file in
simple-config-chapter. However, instead of connecting the CPU directly
to the memory bus, we are going to instantiate a SimpleMemobj and
place it between the CPU and the memory bus.
import m5
from m5.objects import *
system = System()
system.clk_domain = SrcClockDomain()
system.clk_domain.clock = '1GHz'
system.clk_domain.voltage_domain = VoltageDomain()
system.mem_mode = 'timing'
system.mem_ranges = [AddrRange('512MB')]
system.cpu = X86TimingSimpleCPU()
system.memobj = SimpleMemobj()
system.cpu.icache_port = system.memobj.inst_port
system.cpu.dcache_port = system.memobj.data_port
system.membus = SystemXBar()
system.memobj.mem_side = system.membus.cpu_side_ports
system.cpu.createInterruptController()
system.cpu.interrupts[0].pio = system.membus.mem_side_ports
system.cpu.interrupts[0].int_requestor = system.membus.cpu_side_ports
system.cpu.interrupts[0].int_responder = system.membus.mem_side_ports
system.mem_ctrl = DDR3_1600_8x8()
system.mem_ctrl.range = system.mem_ranges[0]
system.mem_ctrl.port = system.membus.mem_side_ports
system.system_port = system.membus.cpu_side_ports
process = Process()
process.cmd = ['tests/test-progs/hello/bin/x86/linux/hello']
system.cpu.workload = process
system.cpu.createThreads()
root = Root(full_system = False, system = system)
m5.instantiate()
print ("Beginning simulation!")
exit_event = m5.simulate()
print('Exiting @ tick %i because %s' % (m5.curTick(), exit_event.getCause()))
You can download this config script here.
Now, when you run this config file you get the following output.
gem5 Simulator System. http://gem5.org
gem5 is copyrighted software; use the --copyright option for details.
gem5 compiled Jan 5 2017 13:40:18
gem5 started Jan 9 2017 10:17:17
gem5 executing on chinook, pid 5138
command line: build/X86/gem5.opt configs/learning_gem5/part2/simple_memobj.py
Global frequency set at 1000000000000 ticks per second
warn: DRAM device capacity (8192 Mbytes) does not match the address range assigned (512 Mbytes)
0: system.remote_gdb.listener: listening for remote gdb #0 on port 7000
warn: CoherentXBar system.membus has no snooping ports attached!
warn: ClockedObject: More than one power state change request encountered within the same simulation tick
Beginning simulation!
info: Entering event queue @ 0. Starting simulation...
Hello world!
Exiting @ tick 507841000 because target called exit()
If you run with the SimpleMemobj debug flag, you can see all of the
memory requests and responses from and to the CPU.
gem5 Simulator System. http://gem5.org
gem5 is copyrighted software; use the --copyright option for details.
gem5 compiled Jan 5 2017 13:40:18
gem5 started Jan 9 2017 10:18:51
gem5 executing on chinook, pid 5157
command line: build/X86/gem5.opt --debug-flags=SimpleMemobj configs/learning_gem5/part2/simple_memobj.py
Global frequency set at 1000000000000 ticks per second
Beginning simulation!
info: Entering event queue @ 0. Starting simulation...
0: system.memobj: Got request for addr 0x190
77000: system.memobj: Got response for addr 0x190
77000: system.memobj: Got request for addr 0x190
132000: system.memobj: Got response for addr 0x190
132000: system.memobj: Got request for addr 0x190
187000: system.memobj: Got response for addr 0x190
187000: system.memobj: Got request for addr 0x94e30
250000: system.memobj: Got response for addr 0x94e30
250000: system.memobj: Got request for addr 0x190
...
You may also want to change the CPU model to the out-of-order model
(X86O3CPU). When using the out-of-order CPU you will potentially see
a different address stream since it allows multiple memory requests
outstanding at a once. When using the out-of-order CPU, there will now
be many stalls because the SimpleMemobj is blocking.